Optimization algorithms using pytorch
Optimization algorithms comparision and 3D & 2D visualisation



Optimization algorithms play a central role in the learning process of most of the machine learning and deep learning algorithms. Here are some of the well known algorithms-
- Vanilla Gradient descent
- Gradient descent with Momentum
- RMSprop
- Adam
While all the 4 above listed algorithms differ in their own way and have certain advantages and disadvantages. They share certain similarities with the simple graddient descent algorithm. In this blog post we will go through these 4 algorithms and see how they function on minimizing the loss or finding the minima of a random error function with multiple minimas and maximas implemented using pytorch.
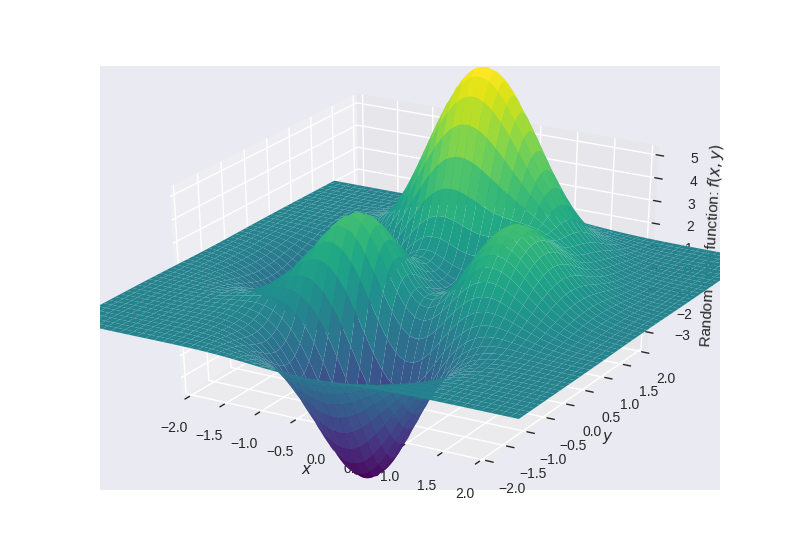
Error function with multiple minimas and maximas
Error Function $= f(x,y) = 3 \times e^{(-(y + 1)^2 - x^2)} \times (x - 1)^2 - \frac{e^{(-(x + 1)^2 - y^2)}}{3} + e^{(-x^2 - y^2)} \times (10x^3 - 2x + 10y^5)$
Note: In this blog post, I will not be going into the theory of all the algorithms used rather just concentrate on the implementation and the results
For theoretical reference please refer to d2lai chapter on optimization algorithms
%matplotlib widget
import torch
import IPython
import numpy as np
from IPython import display
from IPython.display import HTML, Video
import matplotlib as mpl
import matplotlib.pyplot as plt
from matplotlib import animation
from mpl_toolkits.mplot3d import Axes3D
from mpl_toolkits.mplot3d import proj3d
from matplotlib.patches import FancyArrowPatch
# mpl.rcParams['savefig.dpi'] = 300
plt.style.use('seaborn')
class Arrow3D(FancyArrowPatch):
def __init__(self, xs, ys, zs, *args, **kwargs):
FancyArrowPatch.__init__(self, (0, 0), (0, 0), *args, **kwargs)
self._verts3d = xs, ys, zs
def draw(self, renderer):
xs3d, ys3d, zs3d = self._verts3d
xs, ys, zs = proj3d.proj_transform(xs3d, ys3d, zs3d, renderer.M)
self.set_positions((xs[0], ys[0]), (xs[1], ys[1]))
FancyArrowPatch.draw(self, renderer)
def calc_z(xx, yy)-> torch.tensor:
"""
Returns the loss at a certain point
"""
return 3 * torch.exp(-(yy + 1) ** 2 - xx ** 2) * (xx - 1) ** 2 - torch.exp(-(xx + 1) ** 2 - yy ** 2) / 3 + torch.exp(
-xx ** 2 - yy ** 2) * (10 * xx ** 3 - 2 * xx + 10 * yy ** 5)
fps = 10 # frames per second - to save the progress in optimization as a video
Writer = animation.writers['ffmpeg']
writer = Writer(fps=fps, metadata=dict(artist='Me'), bitrate=1800)
x = torch.linspace(-3, 3, 600)
y = torch.linspace(-3, 3, 600)
xgrid, ygrid = torch.meshgrid(x, y)
zgrid = calc_z(xgrid, ygrid)
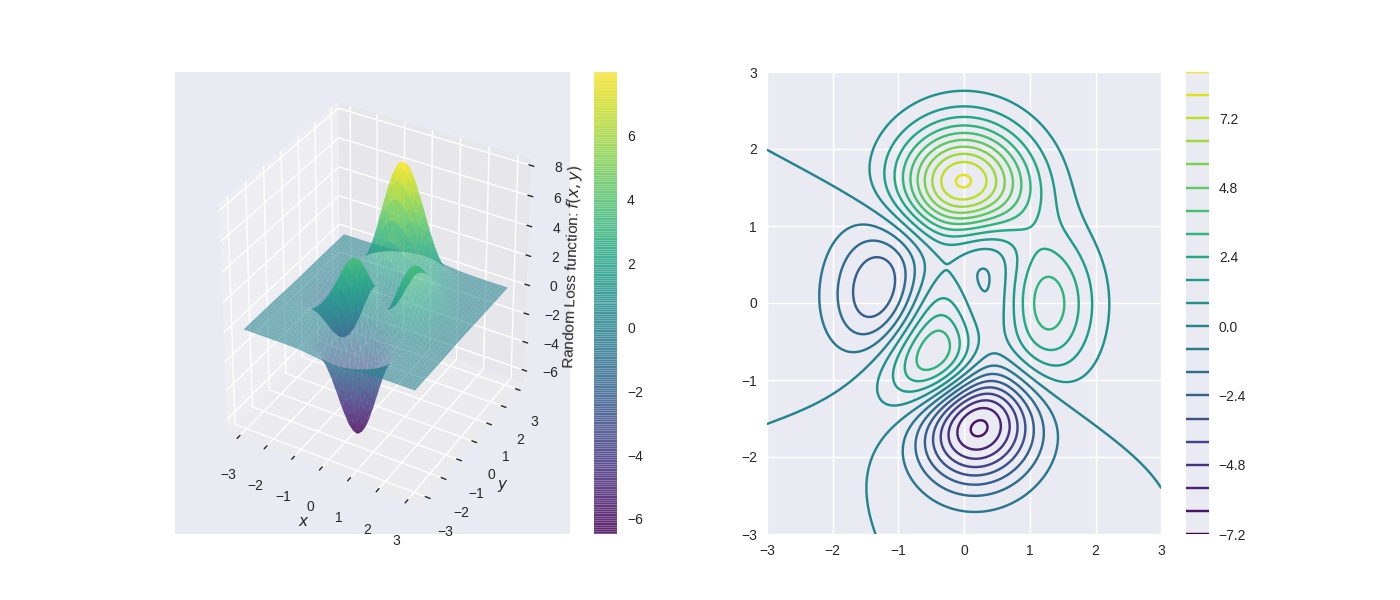
fig = plt.figure(figsize=(14,6))
ax0 = fig.add_subplot(121, projection='3d')
ax0.set_xlabel('$x$')
ax0.set_ylabel('$y$')
ax0.set_zlabel('Random Loss function: ' + '$f(x, y)$')
ax0.axis('auto')
cs = ax0.plot_surface(xgrid.numpy(), ygrid.numpy(), zgrid.numpy(), cmap='viridis', alpha=0.6)
fig.colorbar(cs)
ax1 = fig.add_subplot(122)
qcs = ax1.contour(xgrid.numpy(), ygrid.numpy(), zgrid.numpy(), 20, cmap='viridis')
fig.colorbar(qcs)
Vanilla Gradient Descent
Gradient descent algorithm which is an iterative optimization algorithm can be described as loop which is executed repeatedly until certain convergence criteria has been met. Gradient descent can be explained using the following equation.
Gradient calculation
$\frac{\partial (Error)}{\partial (w_{x,y}^l)} = \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix}$
Update equation
$w_{x,y}^l = w_{x,y}^l - lr \times \frac{\partial (Error)}{\partial (w_{x,y}^l)}$
epochs = 20
lr = 0.01 # learning rate
xys = torch.tensor([-0.5, -0.7], requires_grad=True) # initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
new_z = 0
dy_dx_current = 0
def step_gd(i):
global dy_dx_current, xys, lr, new_z, ax0, ax1
if i == 0:
# initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
xys = torch.tensor([-0.5, -0.7], requires_grad=True)
new_z = calc_z(xys[0], xys[1])
new_z.backward()
dy_dx_current = xys.grad
cache_pt = [xys[0].detach().numpy(), xys[1].detach().numpy(), new_z.detach().numpy()]
xys = (xys - lr * dy_dx_current).clone().detach().requires_grad_(True)
# vanilla gradient descent
new_z = calc_z(xys[0], xys[1])
new_z.backward()
# store the new gradient with respect to x and y i.e., (d(error))/ (dx), (d(error))/ (dy)
dy_dx_current = xys.grad
xys_plot = xys.detach().numpy()
ax0.scatter(xys_plot[0], xys_plot[1], new_z.detach().numpy(), marker='s', c='r', s=20, zorder=3)
a = Arrow3D([cache_pt[0], xys_plot[0]], [cache_pt[1], xys_plot[1]],
[cache_pt[2], new_z.detach().numpy()], mutation_scale=5,
lw=2, arrowstyle="-|>", color="k")
ax0.add_artist(a)
ax1.scatter(xys_plot[0], xys_plot[1], marker='*', c='r')
anim_gd = animation.FuncAnimation(fig, step_gd, frames=epochs, interval=(1/fps)*1000, repeat=False)
anim_gd.save('gd.mp4', writer=writer)
Video("../images/optimization_algos/gd.mp4", embed=True)
Gradient descent with momentum
Gradient calculation
$\frac{\partial (Error)}{\partial (w_{x,y}^l)} = \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} = \beta * \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} + (1 - \beta) * \begin{vmatrix} \frac{\partial (Error_{new})}{\partial x} \\ \frac{\partial (Error_{new})}{\partial y} \end{vmatrix}$
Update equation
$w_{x,y}^l = w_{x,y}^l - lr \times \frac{\partial (Error)}{\partial (w_{x,y}^l)}$
epochs = 60
lr = 0.01 # learning rate
xys = torch.tensor([-0.5, -0.7], requires_grad=True) # initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
new_z = 0
dy_dx_current_gdm = 0
dy_dx_new_gdm = torch.tensor([0.0, 0.0])
def step_gdm(i):
global dy_dx_new_gdm, dy_dx_current_gdm, xys, lr, new_z, ax0, ax1
if i == 0:
# initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
xys = torch.tensor([-0.5, -0.7], requires_grad=True)
new_z = calc_z(xys[0], xys[1])
new_z.backward()
dy_dx_current_gdm = xys.grad
cache_pt = [xys[0].detach().numpy(), xys[1].detach().numpy(), new_z.detach().numpy()]
dy_dx_new_gdm = 0.9*dy_dx_new_gdm + (1 - 0.9)*dy_dx_current_gdm
xys = (xys - lr * dy_dx_new_gdm).clone().detach().requires_grad_(True)
# gradient descent with momentum
new_z = calc_z(xys[0], xys[1])
new_z.backward()
# store the new gradient with respect to x and y i.e., (d(error))/ (dx), (d(error))/ (dy)
dy_dx_current_gdm = xys.grad
xys_plot = xys.detach().numpy()
ax0.scatter(xys_plot[0], xys_plot[1], new_z.detach().numpy(), marker='s', c='g', s=20, zorder=3)
a = Arrow3D([cache_pt[0], xys_plot[0]], [cache_pt[1], xys_plot[1]],
[cache_pt[2], new_z.detach().numpy()], mutation_scale=5,
lw=2, arrowstyle="-|>", color="k")
ax0.add_artist(a)
ax1.scatter(xys_plot[0], xys_plot[1], marker='*', c='g')
anim_gdm = animation.FuncAnimation(fig, step_gdm, frames=epochs, interval=(1/fps)*1000, repeat=False)
anim_gdm.save('momentum.mp4', writer=writer)
Video("../images/optimization_algos/momentum.mp4", embed=True)
RMSprop
Gradient calculation
$\frac{\partial (Error)}{\partial (w_{x,y}^l)} = \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} = \beta * \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} + (1 - \beta) * \begin{vmatrix} \frac{\partial (Error_{new})}{\partial x} \\ \frac{\partial (Error_{new})}{\partial y} \end{vmatrix}^2$
Update equation
$w_{x,y}^l = w_{x,y}^l - lr \times \frac{\frac{\partial (Error_{new})}{\partial (w_{x,y}^l)}}{\sqrt{\frac{\partial (Error)}{\partial (w_{x,y}^l)} + \epsilon}}$
epochs = 150
rmsprop_lr = 0.01 # learning rate
xys = torch.tensor([-0.5, -0.7], requires_grad=True) # initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
epsilon = 1e-7 # small constant to avoid division by zero
new_z = 0
dy_dx_current_rmsprop = 0
dy_dx_new_rmsprop = torch.tensor([0.0, 0.0])
def step_rmsprop(i):
global dy_dx_new_rmsprop, dy_dx_current_rmsprop, xys, rmsprop_lr, new_z, ax0, ax1
if i == 0:
# initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
xys = torch.tensor([-0.5, -0.7], requires_grad=True)
new_z = calc_z(xys[0], xys[1])
new_z.backward()
dy_dx_current_rmsprop = xys.grad
cache_pt = [xys[0].detach().numpy(), xys[1].detach().numpy(), new_z.detach().numpy()]
dy_dx_new_rmsprop = 0.9*dy_dx_new_rmsprop + (1 - 0.9)*torch.pow(dy_dx_current_rmsprop,2)
xys = (xys - rmsprop_lr * (dy_dx_current_rmsprop/(torch.sqrt(dy_dx_new_rmsprop) + epsilon))).clone().detach().requires_grad_(True)
# gradient descent with momentum
new_z = calc_z(xys[0], xys[1])
new_z.backward()
# store the new gradient with respect to x and y i.e., (d(error))/ (dx), (d(error))/ (dy)
dy_dx_current_rmsprop = xys.grad
xys_plot = xys.detach().numpy()
ax0.scatter(xys_plot[0], xys_plot[1], new_z.detach().numpy(), marker='s', c='b', s=20, zorder=3)
a = Arrow3D([cache_pt[0], xys_plot[0]], [cache_pt[1], xys_plot[1]],
[cache_pt[2], new_z.detach().numpy()], mutation_scale=5,
lw=2, arrowstyle="-|>", color="k")
ax0.add_artist(a)
ax1.scatter(xys_plot[0], xys_plot[1], marker='*', c='b')
anim_rmsprop = animation.FuncAnimation(fig, step_rmsprop, frames=epochs, interval=(1/fps)*1000, repeat=False)
anim_rmsprop.save('rmsprop.mp4', writer=writer)
Video("../images/optimization_algos/rmsprop.mp4", embed=True)
Adam
Gradient calculation
${\partial (Error)}_{momentum} = \frac{\partial (Error)}{\partial (w_{x,y}^l)} = \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} = \beta_1 * \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} + (1 - \beta_1) * \begin{vmatrix} \frac{\partial (Error_{new})}{\partial x} \\ \frac{\partial (Error_{new})}{\partial y} \end{vmatrix}$
${\partial (Error)}_{rmsprop} = \frac{\partial (Error)}{\partial (w_{x,y}^l)} = \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} = \beta_2 * \begin{vmatrix} \frac{\partial (Error)}{\partial x} \\ \frac{\partial (Error)}{\partial y} \end{vmatrix} + (1 - \beta_2) * \begin{vmatrix} \frac{\partial (Error_{new})}{\partial x} \\ \frac{\partial (Error_{new})}{\partial y} \end{vmatrix}^2$
Update equation
$w_{x,y}^l = w_{x,y}^l - lr \times \frac{\partial (Error)_{momentum}}{\sqrt{\partial (Error)_{rmsprop}} + \epsilon}$
epochs = 240
adam_lr = 0.01 # learning rate
xys = torch.tensor([-0.5, -0.7], requires_grad=True) # initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
epsilon = 1e-7 # small constant to avoid division by zero
new_z = 0
dy_dx_current_mom = 0
dy_dx_current_rmsprop = 0
dy_dx_new = torch.tensor([0.0, 0.0])
def step_adam(i):
global dy_dx_current_mom, dy_dx_current_rmsprop, dy_dx_new, xys, adam_lr, new_z, ax0, ax1
if i == 0:
# initialise starting point of search for minima, another possible starting position np.array([0.1, 1.4])
xys = torch.tensor([-0.5, -0.7], requires_grad=True)
new_z = calc_z(xys[0], xys[1])
new_z.backward()
dy_dx_new = xys.grad
cache_pt = [xys[0].detach().numpy(), xys[1].detach().numpy(), new_z.detach().numpy()]
dy_dx_current_mom = 0.9*dy_dx_current_mom + (1 - 0.9)*dy_dx_new
dy_dx_current_rmsprop = 0.9*dy_dx_current_rmsprop + (1 - 0.9)*torch.pow(dy_dx_new,2)
xys = (xys - adam_lr * (dy_dx_current_mom/(torch.sqrt(dy_dx_current_rmsprop) + epsilon))).clone().detach().requires_grad_(True)
# gradient descent with momentum
new_z = calc_z(xys[0], xys[1])
new_z.backward()
# store the new gradient with respect to x and y i.e., (d(error))/ (dx), (d(error))/ (dy)
dy_dx_new = xys.grad
xys_plot = xys.detach().numpy()
ax0.scatter(xys_plot[0], xys_plot[1], new_z.detach().numpy(), marker='s', c='c', s=20, zorder=3)
a = Arrow3D([cache_pt[0], xys_plot[0]], [cache_pt[1], xys_plot[1]],
[cache_pt[2], new_z.detach().numpy()], mutation_scale=5,
lw=2, arrowstyle="-|>", color="k")
ax0.add_artist(a)
ax1.scatter(xys_plot[0], xys_plot[1], marker='*', c='c')
anim_adam = animation.FuncAnimation(fig, step_adam, frames=epochs, interval=(1/fps)*1000, repeat=False)
anim_adam.save('adam.mp4', writer=writer)
Video("../images/optimization_algos/adam.mp4", embed=True)
Results
We see that all the algorithms find the minimas but take significatnly different paths. While Vanilla gradient descent and gradient descent with momentum find the minima faster compared to RMSprop and Adam here for the same learning rate, studies have proven Adam to be more stable and this ability allows to use higher learning rates as compared to the same learning rates used here.